人物・顔画像認識 |
|
 |
機械との自然な対話を目指す手段として、日常的なコミュニケーション手段に用いられる『ジェスチャ』を利用することを提案します。
「ジェスチャ」とは、身振り、手振りを意味し、相手への意思表示として我々は用いています。果たしてそこに明確な定義があるのでしょうか?そもそも、人はどのようにして「ジェスチャ」を認識しているのでしょうか?
機械に「ジェスチャ」を理解させるためには、人がまずそれを知らなければなりません。そのために、「ジェスチャ」という動きを解析し、その特徴をロボットに実装することを目標として研究を行っています。 |

|
人がコミュニケーションをはかる際の間合い(相手との距離)の概念をロボットに搭載することで,より人間らしいロボットとなります.しかし,間合いの概念を考慮するためには距離の変化が問題となります.そこで,この「間合いロボット」を構築するための重要な要素となる,距離変化に対して柔軟な顔領域検出,個人認識について研究を行っています.
|

|
近年の自律移動型ロボットのうち,最も私たちに身近であるのがペットロボット.そのペットロボットと人間とのコミュニケーションの一環として,ペットロボットに人間の顔表情を学習・認識させ,感情表現をさせるシステムを構築しています.このシステムは,ペットロボットが人間の赤ちゃんと同じように表情を学習していき,それに対して声や体で感情表現をするという大変ユニークなものです.
|

|
顔を使った個人認証において,単純かつ大きな問題は写真で偽装されてしまうという問題です.この問題を解決するために,低コストかつシンプルな手法で顔表面の擬似3次元情報を取得し,人物と写真との判別を行うシステムです.
|

|
人間の顔には表情があり一定のものではありません.しかし,鼻は変化が少なく個人認証を行う上で扱いやすい特徴となるのではというのが本研究のアイデアです.そこで,近赤外光照度差ステレオにより顔の表面方向画像を取得し,そのうちの鼻の形状特徴のみを用いて個人認証に適用する研究を行っています.
|
|
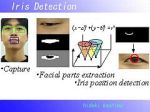
近年,ボタンやリモコンにかわる人間からコンピュータへの新しいインターフェース入力の実現に関する研究が行われています.そこで我々は視線によるインターフェースシステムの構築を想定して,目の特徴点抽出によるリアルタイム視線認識の研究を行っています.
|

|
本研究ではサラウンディングカメラシステムによりコンピュータと人間とのインタラクティブなインターフェースシステムの構築を目指しています.このシステムでは,モニタの上下左右の四箇所にカメラが設置されており,この4台のカメラの画像情報から顔向きによりユーザーの注目点推定を行い,モニタ上でのポインタコントロールなどに用いることができます.
|
|
|
|