岐阜大学工学部応用情報学科 加藤研究室


コンピュータビジョン
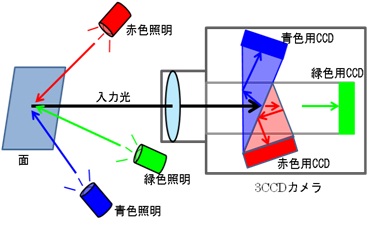
照度差ステレオカメラ原理
ジェスチャ認識による直感的ユーザインターフェースシステムの構築
リハビリテーション支援システム
運転者支援システム
見え方の変化を再現する三次元表示システムの構築
ヒューマノイド・ロボット(YAMATO)
|
物体表面の明るさは、その面の光源に対する向きによって変化します。これを利用して、物体表面の明るさからその面の方向を推定します。 複数の波長光の同時照射を行うことにより、リアルタイムに面法線ベクトルを計測します。 |
 |
| 詳しくはこちら |
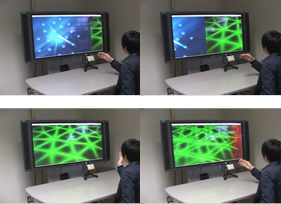
ジェスチャ認識による直感的ユーザインターフェースシステムの構築
|
情報機器の操作にあたり、より直感的に誰でも容易に操作ができるようなユーザインターフェースについての研究が行われています。 本研究では、ジェスチャを認識する手法を考案し、手ぶりを入力とする直感的なユーザインターフェースシステムの構築を行いました。 |
 |
| 詳しくはこちら |
リハビリテーション支援システム
| 脳出血などによる後遺症で片麻痺を抱える人は片側の軸足での歩行では片麻痺の影響により悪い動きとなってしまいますが、逆の軸足での歩行は問題のない動きとななります。一方健常者は左右の軸足での歩行は左右対称となっています.すなわち、正常な歩容とは左右で同じ動きをしていることであるといえます.そこで片麻痺を抱える人の問題のない動きを、悪い動きの参考として重ね合わせて表示することにより左右差がよりはっきりと表れます.そのために画像処理を用いて歩行を解析し、どのような指摘や表示方法を用いるとリハビリテーションの効果がよく表れるのかを研究しています. |
 |
| 詳しくはこちら |
運転者支援システム
| 車内カメラより得られる画像から運転者の状態を検知することにより,ドライバーを支援するシステムの構築を行っています.そこで,本研究では肌と髪の材質による光の反射特性に注目し,肌の素材をダイレクト検出することにより運転者の顔領域を検出する手法を考案しました.本手法はアルゴリズムが非常にシンプルであるため,高速な肌検出が可能となり,夜間における走行実験においてその有効性を確認できました.また,光源に近赤外LEDを用いるため,肌色検出の不可能な真っ暗な状況においても,ドライバーに眩しくなく人の肌の素材を抽出することが可能となりました.ドライバーに眩しくないシステムであることは,人間に気づかれることなく肌を検出できるシステムであると言えるため,セキュリティーにおける人感センサや,偽装検出システムなどへの応用が考えられます.現在,これらの開発も行っています. |
 |
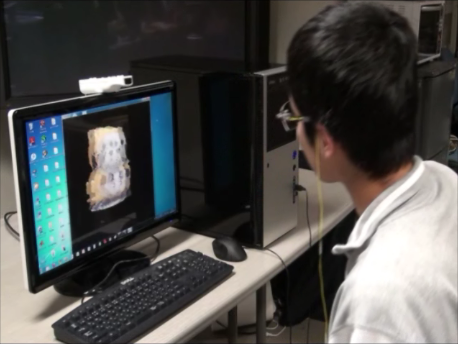
見え方の変化を再現する三次元表示システムの構築
| 本研究では、まず多視点から撮影された映像を基にユーザーが自由に視点を移動して見ることができる自由視点映像を作成します。そして、ユーザーの視点移動に合せて映像を変化させることで視点移動による見え方の変化を再現した三次元表示システムを構築する研究を行っています。 |
 |
ヒューマノイド・ロボット(YAMATO)
|
ヒューマノイドロボットにおいてカメラは目であり,人間らしく動かすことや認識手法により最適な画像処理ができるのではないかと考えます. 本研究では,人間の顔と目の使い方に着目し,解析を行うことで得られた特徴をロボットに実装し,ヒューマノイドビジョンを実現する研究を行っています. |
 |
その他の研究分野
岐阜大学工学部応用情報学科
加藤研究室
岐阜県岐阜市柳戸1-1
岐阜大学工学部応用情報学科
加藤邦人
TEL/FAX:058-293-2756