研吾の部屋
index
menu
ホーム
自己紹介
研究内容
リンク
研究内容
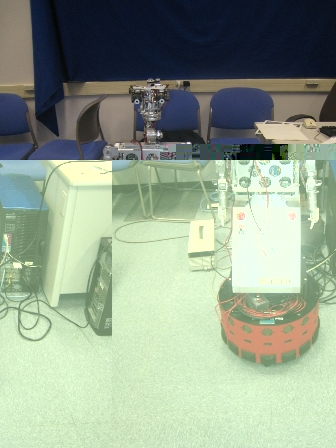
ヒューマノイドロボットYAMATO
YAMATOは頭部に8、各腕に6の合計20の自由度を持つよう設計されている。また頭部のカメラより画像を入手して、その画像により何らかの人間らしいアクションを実現する。