丒拞妛惗帪戙丄朸儘儃僢僩傾僯儊偵偼傑偭偰偨丅
丒儘儃僐儞尒偰偨丅
丒僄儞僕僯傾偲偐丄偳傫側巇帠偐傛偔抦傜偢偵摬傟偰偨丅
丒棟宯偐側丠
丂忋弎偺傛偆側宱堒傪帩偮巹偼丄岺妛晹側傜偳偙偱傕儘儃僢僩偝傢傟傞傛側丠嶌傟傞傛側丠揑側峫偊偱丄婒晫戝妛岺妛晹偵擖傝傑偟偨丅墳梡忣曬妛壢偵偟偨偺偼丄墳梡忣曬妛壢偺儂乕儉儁乕僕偵儘儃僢僩偑偄偨偐傜偱偡丅
丂傑偢丄戝妛偵擖偭偰傃偭偔傝偟偨偺偑丄僾儘僌儔儉側傞懚嵼偱偡丅僾儘僌儔儉偭偰壗丠C尵岅丠偊丄傕偟偐偟偰傒傫側抦偭偰傞偺丠
丂偐側傝丄徟傝傑偟偨丅敿揷偛偰曅庤偵偄傠偄傠嶌傞偲巚偭偰傑偟偨乮傑偀丄屻乆幚尡偺庼嬈偑偁傝傑偟偨偑乯丅
丂偦傫側偙傫側偁傝傑偡偑丄庼嬈傪偙側偟偰偄偔拞偱尒弌偟偨偺偑丄帺暘偼恖岺抦擻偑嶌傝偨偄丄儘儃僢僩偵壗偐傪棟夝偝偣偨偄丄偲偄偆偙偲偩偭偨偺偱偡丅丂
婡夿偲偺僀儞僞乕僼僃乕僗庤抜偺堦偮偲偟偰丄僕僃僗僠儍乕擣幆傪採埬偟偨偄偱偡丅
婡夿偑僕僃僗僠儍傪棟夝偡傞傛偆偵側傟偽丄傛傝恖娫偵嬤偯偔丄恖娫偲枾偵僐儈儏僯働乕僔儑儞傪偲傟傞懚嵼偵側偭偰偄偔偲巚偄傑偡丅
2008.5偔傜偄乣丗 乽偙偭偪棃偄乿丆乽偁偭偪峴偗乿僕僃僗僠儍偺尋媶偵廬帠?
2009.8偔傜偄乣丗 乽偙偭偪棃偄乿丆乽偁偭偪峴偗乿僕僃僗僠儍偺弌椡曽朄偲偐傕(椺:PC憖嶌)
偁偲丄 傕偭偲傎偐偺僕僃僗僠儍偲偐傕丅擣幆偺曌嫮偟偰偪傚偔偪傚偔怓傫側僕僃僗僠儍憹傗偟偰偄偗傟偽偲
2010.5偔傜偄乣丗僀儞僞僼僃乕僗偭傐偄偙偲
擔忢摦嶌丄摿偵乽庤乿偺摦偒偵偮偄偰偪傚偭偲峫偊傑偡丅
乽庤乿丗擼偑奜奅偲娭傢傞偨傔偺擖弌椡僀儞僞僼僃乕僗庤抜
戝擼旂幙偺塣摦栰偲姶妎栰偵偍偗傞乽庤乿偺恄宱巟攝偵娭傢傞晹暘偼丄傎偐偺晹暘偲斾妑偵側傜側偄傎偳戝偒偔丄乽庤乿偼慇嵶側摦偒偑壜擻偱塻偄姶妎傪帩偮婍姱
仺偄傠傫側昞尰(僕僃僗僠儍),偄傠傫側僞僗僋(巇帠丒儓乕儓乕etc.)
仺擔忢揑偵嵟傕巊傢傟傞傕偺
仺傕偭偲傕擼忬懺(怣崋揱払)偑昞尰偝傟傞傕偺
仺偦傫側乽庤乿偺擔忢揑側摦嶌偵偍偗傞嵍塃偺棙梡昿搙丒棙梡椞堟偲偐挷傋偰椉曽偺庤偺棙梡傪懀偣偽丄桳岠側儕僴價儕丒嶌嬈偺岠棪岦忋偲偐偵偮側偑傞傫偠傖側偄丠
仺偦傫側乽庤乿傪擔忢揑偵巜揈偡傞傛偆側僔僗僥儉嶌傝偨偄側
仺儔僀僼儘僌亖忢偵(僇儊儔偑)尒偰傞仺昁梫側帪偵昁梫側忣曬(恖偺峴摦)傪庢傝弌偣傞傛偆側僔僗僥儉偲偐傕柺敀偦偆
2010.9乣丗杮奿巒摦(?)
亂尋媶恑捇忬嫷亃
丒 巜帵揑庤怳傝摦嶌乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺擣幆
丒 僀儞僞僼僃乕僗僔僗僥儉
仒1.偳傫側僕僃僗僠儍偱峌傔傞偐
丂擔忢揑側僕僃僗僠儍丄偭偰偄偆偲壗偑偁傞偐丅
僕僃僗僠儍(Gesture)丗1.恎怳傝丅庤怳傝丅庤恀帡丅乽乣傪岎偊偨夛榖乿
丂丂丂丂丂丂丂丂丂丂丂丂丂
2.巚傢偣傇傝側懺搙丅惤幚偝偵寚偗傞宍偽偐傝偺懺搙丅傒偣偐偗丅乽乣偽偐傝偱傗傞婥偑側偄乿
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丂(峀帿墤傛傝)
丂夛榖偺帪偲偐偵傕丄庤偭偰壗偐偟傜摦偄偰姶忣偺昞尰傪庤彆偗偟偰偔傟偰偄傞丅庤偼岥傎偳偵暔傪尵偆偲偄偆尵梩傕偁偭偨傝側偐偭偨傝丅傾僀僐儞僞僋僩偟偐傝丄僲儞僶乕僶儖側昞尰偭偰丄帺暘偺偙偲傪憡庤偑棟夝偟偰偔傟傞姶偑偁傞丅偠傖丄偙傟傪巊偭偰儘儃僢僩偲僐儈儏僯働乕僔儑儞偲傠偆偤丄偲偄偆榖偱丒丒丒丅
丂丂丂 丂丂丂
丂丂丂 
丂丂丂丂丂僶僀僶僀丂丂丂丂丂丂丂丂丂丂丂偍庤忋偘丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂偁傟
丂僕僃僗僠儍偵偼丄偙傫側偺偑偁傝傑偡(乽擔暷僕僃僗僠儍乕帿揟乿側傞柺敀偄杮偵怓乆偲偺偭偰傑偡丅傑偨徯夘偱偒傟偽)丅
丂偱丄怓乆偁傞側偐偱乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍側傞丄帡偨庤怳傝摦嶌偩偗偳斀懳偺堄枴傪昞偟偰傞傕偺傪峌傔傞偙偲偵丅
仏乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺摿挜
丂1.帡偨摦偒偩偗偳丄恖偼偪傖傫偲乽偙偭偪棃偄乿偲屇傫偱偄傞偺偐丄乽偁偭偪峴偗乿偲捛偄暐偭偰偄傞偺偐傢偐傞丅壗屘丠堘偄偑尒偮偐偭偨傜柺敀偄偠傖傫丅
丂2.帺暘偺巊偭偰傞儘儃僢僩偼幵椉宆丅巜帵揑側乽偙偭偪棃偄乿乽偁偭偪峴偗乿偱摦偐偣偨傜偄偄側丄揑側丅
丂3.屄惈偑偁傞
丂屄惈偑偁傞偭偰偄偆偺偼丄偦傟傪撪曪偟傛偆偲尋媶偟偑偄偑弌偰偔傞傫偠傖側偄偐丅
丂傑偀偦傫側傢偗偱丄壗婥側偄偗偳墱怺偄(?)丄乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偵偮偄偰尋媶偟偰偄偔帠偲側傝傑偟偨丅
*栚昗偼偙傫側姶偠偱僐儈儏僯働乕僔儑儞偑庢傟傟偽両丠
仒2.乽偙偭偪棃偄乿僕僃僗僠儍偲乽偁偭偪峴偗乿僕僃僗僠儍偺堘偄
丂惓柺偐傜尒傞偲丒丒丒丅
a) 乽偙偭偪棃偄乿僕僃僗僠儍(惓柺曽岦)摦夋丂丂丂丂丂b) 乽偁偭偪峴偗乿僕僃僗僠儍(惓柺曽岦)摦夋
丂傢偐傝傑偡丅偱傕丄壗偑堘偆偺丠偲尵傢傟偨傜崲傞丅曉摎偼丄乽壗偲側偔乿丄乽僼傿乕儕儞僌乿偲偄偭偨傕偺偱偼側偄偐丠
(傕偭偲傕丄偙偺抜奒偱乽偙偙偑堘偆偠傖傫両乿偲尵傢傟偨傜帺暘偑崲傝傑偡)
丂偄偮傑偱傕挱傔偰偄偰偼尋媶偱偒側偄丅偄偮傑偱傕挱傔偰偄偰傕壗傕摼傜傟側偄丅偝偰丄偳偆偡傞偐丅
丂伀偙偆偟傑偟偨
a)乽偙偭偪棃偄乿僕僃僗僠儍(墶曽岦)摦夋丂丂丂丂丂
b) 乽偁偭偪峴偗乿僕僃僗僠儍(墶曽岦)摦夋
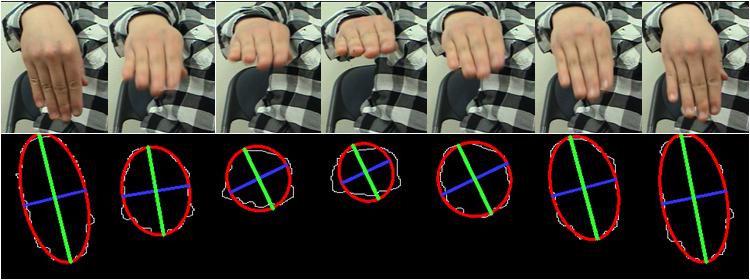
丂偙偺傛偆偵墶曽岦偐傜尒傞偙偲偱丄3師尦揑側庤偺摦偒偑娤應偝傟傑偡丅
偱丄偙傫側姶偠伀偵儌乕僔儑儞僉儍僾僠儍偱庤怳傝摦嶌傪傪夝愅偟傑偡丅
a)
嶣塭摦夋丂丂丂丂丂b) 夝愅摦夋
丂壗恖偐偺庤怳傝摦嶌傪挷傋偨寢壥
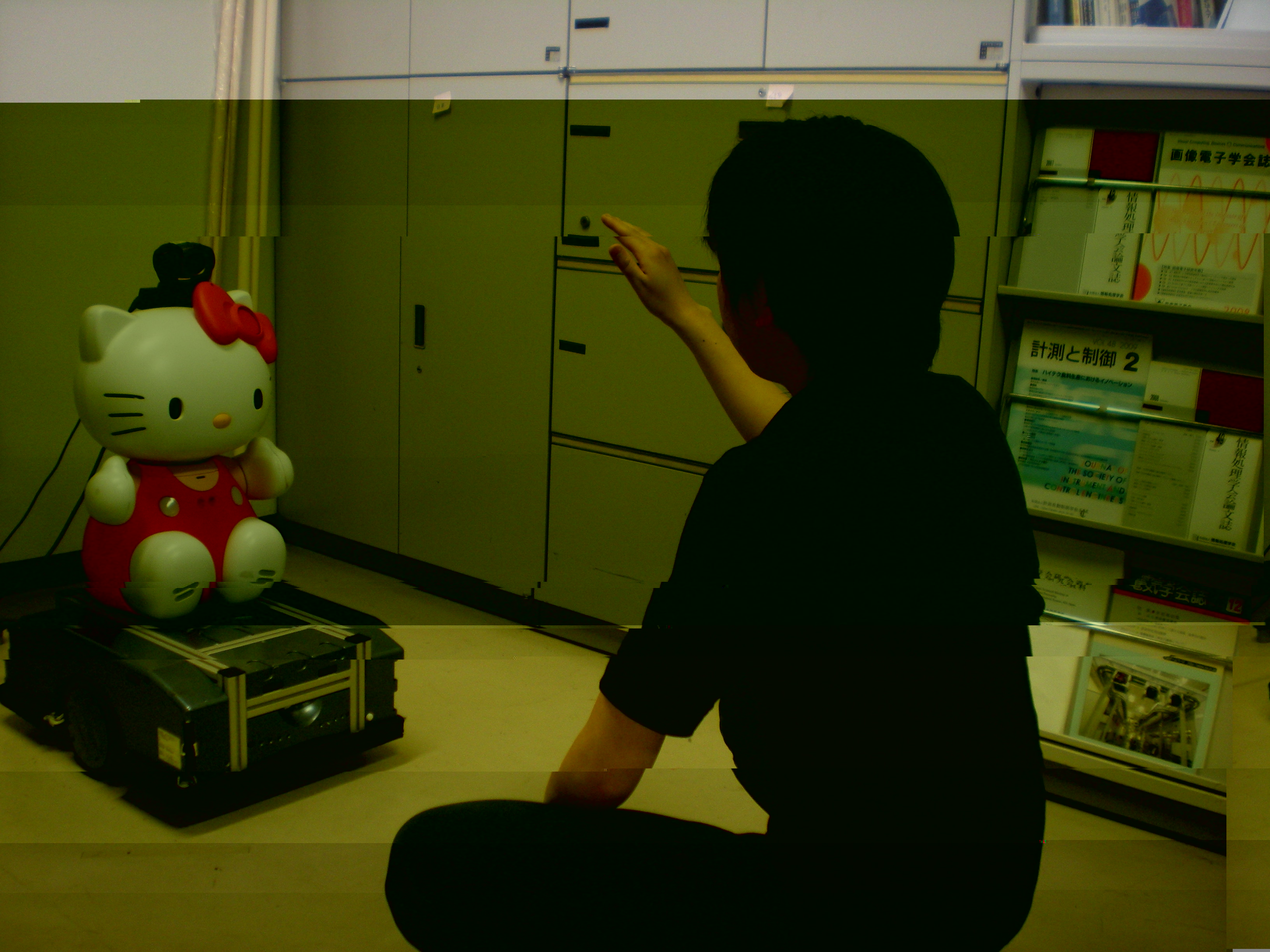
丂丒乽偙偭偪棃偄乿丆乽偁偭偪峴偗乿偼庤庱偺廃婜塣摦(1怳傝栺0.5s)佁廃攇悢夝愅偱庤怳傝廃攇悢惉暘偺僷儚乕傪尒傟偽廃婜塣摦偺専弌偱偒傞傫偠傖側偄?
丂丒怳傝曽偵屄惈偑偁傞(廲怳傝傗幬傔怳傝丄怳傞夞悢)
丂丒乽偙偭偪棃偄乿僕僃僗僠儍偱偼丄彈惈偼旾傪嬋偘傞孹岦偑偁傞傛偆側丄側偄傛偆側丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂抝惈偼旾傪怢偽偡孹岦偑偁傞傛偆側丄側偄傛偆側丅
丂仏庤庱偺妏懍搙偺帪娫曄壔偵堘偄偑偁傞丅
丂丂乽偙偭偪棃偄乿僕僃僗僠儍偱偼丄乽棃偄両乿偲庤傪壓偵怳傞帪偑懍偄
丂丂乽偁偭偪峴偗乿僕僃僗僠儍偱偼丄乽峴偗両乿偲庤傪忋偵暐偆帪偑懍偄
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂佀婎杮廃攇偲2師崅挷攇偺埵憡偺堘偄偱敾暿偱偒傞傫偠傖側偄?
丂埲忋丄擣幆偺戝慜採乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺堘偄偑尒偮偐傝傑偟偨丅(偙傟偑尒偮偐傜側偗傟偽尋媶偼偙偙偱懪偪愗傝偩偭偨偺偱偼丒丒丒?)
仒3.廃攇悢夝愅偵傛傞巜帵撪梕偺敾暿
丂乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺堘偄偑丄懍搙曄壔偺堘偄偲偟偰敪尒偝傟傑偟偨丅
娙扨偵曄壔偺堘偄傪儌僨儖偵偟偰偟傑偆偲
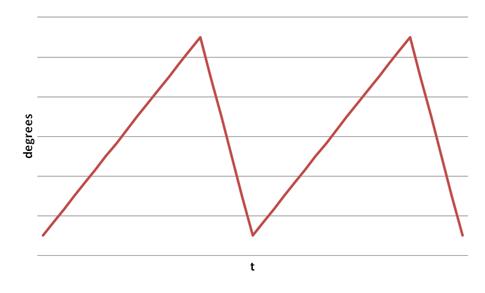
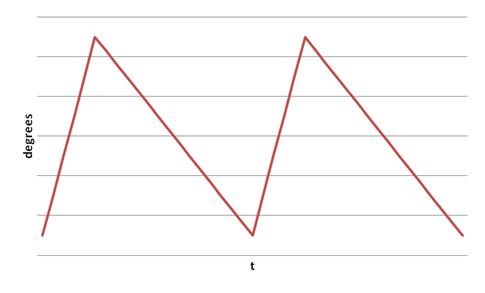
(曄壔儌僨儖A) (曄壔儌僨儖B)
偙偺2偮偺儌僨儖偺堘偄偑乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺堘偄(尒傞恖偑尒傟偽丄偡偖偵乽偁偀丄埵憡偑堘偆傫偠傖傫乿偲偄偆偲偙傠)丅
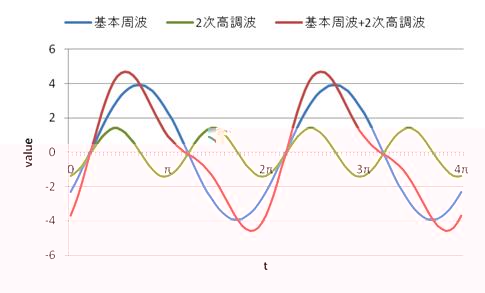
廃攇悢惉暘偵暘夝偟偰丄偳傫側廃攇悢偺攇宍偑偳傫側戝偒偝偱擖偭偰丄忋偺攇宍偑偱偒偰偄傞偺偐傪壓恾偱帵偟傑偡
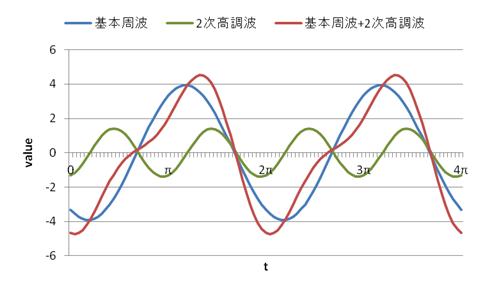
(曄壔儌僨儖A)
(曄壔儌僨儖B)
丂攇宍偺榗傒曽偺堘偄(嶳偑塃偵婑偭偨傝丄嵍偵婑偭偨傝)偼丄偦偺攇宍傪峔惉偟偰偄傞婎杮廃攇偵懳偟偰2師崅挷攇偑偳偺傛偆側埵抲(埵憡)偱壛嶼偝傟傞偐丄偲偄偆丄2攇挿娫偺埵憡嵎偱昞偡偙偲偑偱偒傞丅
偲丄偄偆偙偲偱乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍偺敾暿偵梡偄傞偙偲偲偟傑偡丅
丂廃攇悢夝愅偱廃婜揑側摿挜傪巊偭偰偄傞偺偱嵎暘偺傛偆側2揰偺曄壔偱偼側偔丄慡懱偺曄壔傪懆偊傜傟傑偡丅恖偭偰偄偄壛尭(庤僽儗偑偁偭偨傝)偩偐傜桳岠丅
仒4.惓柺傊偺奼挘(?)
丂庤庱偺妏懍搙曄壔偵堘偄偑偁傞偙偲偑暘偐偭偨丅偱傕丄僕僃僗僠儍偼憡庤偺惓柺傪岦偄偰峴偆傕偺丅庤庱妏搙偑惓柺曽岦偐傜娤應偝傟傞摿挜偲偳偆懳墳偟偰偄傞偐丅
偦偆偄偭偨峫偊偺傕偲偙傫側姶偠偵
丂偙傫側姶偠偵墶曽岦偱偟偐娤應偱偒側偄庤庱妏搙偲偄偭偨摿挜傪惓柺曽岦夋憸偵懳墳偝偣傑偟偨(偲傝偁偊偢崱偼柺愊S傪庤庱妏搙偵懳墳偟偨摿挜偲偟偰梡偄傑偡)丅
摉偨傝慜?偱傕丄庤庱妏搙堄幆偟側偄偲丄柺愊偼偨偩偺柺愊丅偦傫側偨偩偺柺愊偵庤庱妏搙偺奣擮傪擖傟偰偄傞偺偱奼挘側傞尵梩傪巊傢偣偰傕傜偄傑偟偨丅
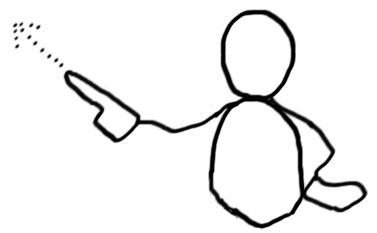
仒5.庤椞堟偺懭墌嬤帡摿挜偺棙梡
丂忋偺僙僋僔儑儞偵偰丄柺愊傪庤怳傝摦嶌偺摿挜偲偟偰偄偨偗偳丄乽廲怳傝乿丄乽傂偹偭偨傝偟側偔偰墶暆堦掕乿偭偰偄偆壖掕偱惉傝棫偮傛偆側摿挜丅幚嵺偼丒丒丒

偙傫側姶偠丅乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿偭偰丄摿偵嫵偊傜傟偰峴偆傛偆側僕僃僗僠儍偱偼側偔丄擔忢揑側僕僃僗僠儍偱偁傞庤怳傝摦嶌偱偼屄惈偑懚嵼丅摨偠昞尰偺庤怳傝摦嶌偱偁偭偰傕丄恖偵傛偭偰庤怳傝曽岦偑堘偭偨傝偡傞丅偱傕丄庤庱傪巟揰偲偟偨庤怳傝摦嶌偱偁傞偙偲偵偼堘偄偑側偔丄乽偙偭偪乿乽偁偭偪乿偼庤怳傝懍搙偺曄壔僞僀儈儞僌偺堘偄偱昞尰丅
偦傫側傢偗偱
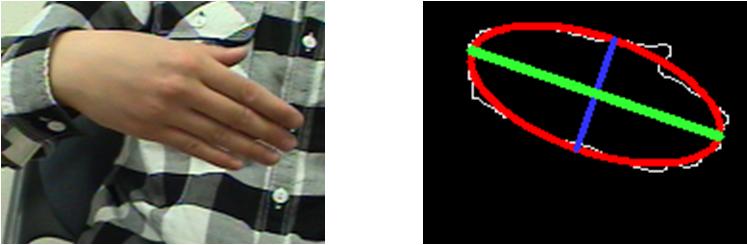
丂丂丂丂 丂擖椡夋憸丂
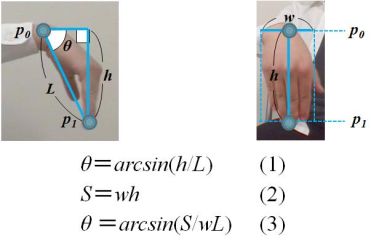
庤椞堟偺懭墌嬤帡
庤怳傝曽岦偺摿挜傪丄庤椞堟傪懭墌嬤帡偟偰摼傜傟傞懭墌摿挜(幉丒孹偒)偐傜媮傔傞偙偲偱丄屄惈偵傛傞庤怳傝曽岦偺堘偄偵懳張丅
偱丄
恾偺椢慄偱帵偝傟傞庤怳傝曽岦偵懳墳偟偨摿挜偲偟偰丄懭墌挿幉挿亖庤怳傝曽岦偺戝偒偝傪帵偡乽庤怳傝儀僋僩儖乿偑媮傔傜傟傞丅
乽偙偭偪棃偄乿丟壓曽岦偵庤傪怳傞偲偒偑憗偄仺媫偵乽庤怳傝儀僋僩儖乿偑戝偒偔側偭偰丄備偭偔傝乽庤怳傝儀僋僩儖乿偑彫偝偔側傞
乽偁偭偪峴偗乿丟忋曽岦偵庤傪怳傞偲偒憗偄仺備偭偔傝乽庤怳傝儀僋僩儖乿偑戝偒偔側偭偰丄媫偵乽庤怳傝儀僋僩儖乿偑彫偝偔側傞
仒6.庤怳傝摦嶌擣幆傾儖僑儕僘儉
1)敡怓忣曬偐傜庤椞堟傪拪弌(仼偙偙偑1,2傪憟偆晄埨梫慺丅偱傕丄偦傫側晄埨傪夝寛偡傞媄弍偑尋媶幒偵偁偭偨傝偟傑偡丅)
2)庤椞堟偐傜庤怳傝摿挜拪弌(懭墌嬤帡丄庤怳傝儀僋僩儖庢摼)
3)僒儞僾儕儞僌(栺1.5昩)佀廃攇悢夝愅
4)廃攇悢惉暘偺戝偒偝(庤怳傝傪偟偰偄傞側傜丄摿掕偺廃攇悢(庤怳傝廃攇悢)偺惉暘偑偦傟埲奜偺廃攇悢惉暘傛傝傕戝偒偔側傞)丄傪梡偄偰庤怳傝専弌
5)庤怳傝専弌偝傟偨傜丄婎杮廃攇偲2師崅挷攇偺埵憡偐傜乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿僕僃僗僠儍傪敾暿
崱偺偲偙傠丄庤怳傝3夞暘偺1.5昩偱僒儞僾儕儞僌丅偱傕丄幚嵺庤怳傝偭偰1,2夞偔傜偄偟側偄(憡庤偑摦偐側偗傟偽傂偨偡傜傗傝懕偗傞偐丄掹傔傞偐丒丒丒)丅偱傕丄僒儞僾儖尭傜偟偨傜廃攇悢夝愅偺堄枴偑丒丒丒丅傑偩傑偩崱屻偺壽戣偱丅
仒7.寢壥
丂尰抜奒(2009.12)偱偼丄偙傫側姶偠偱偡丅
擣幆摦夋 丂丂
*湏堄揑姶偑斲傔傑偣傫偑丄偦偙傜傊傫傕崱屻偺壽戣偱偡丅
偙偺巜帵揑側庤怳傝摦嶌偺擣幆庤朄偼丄摨條側摦偒偐傜丄偦偺懍搙曄壔偺堘偄傪廃攇悢惉暘偐傜擣幆偱偒傞偙偲傪帵偟偰偄傞丅偦偙偱丄乽偙偭偪棃偄乿丄乽偁偭偪峴偗乿偺傛偆偵曽岦惈傪帵偡庤怳傝摦嶌偱偁傞乽儁乕僕傔偔傝乿丄乽儁乕僕偼傜偄乿偲偄偆儁乕僕孞傝摦嶌偺擣幆偵揔墳偟丄PC僀儞僞僼僃乕僗僔僗僥儉偲偟偰峔抸偟偨丅
仒1.儁乕僕孞傝摦嶌
丂儁乕僕孞傝摦嶌偼丄庤傪1怳傝偡傞娫偺怳傝曽(懍搙曄壔偺僞僀儈儞僌)偺堘偄偵傛偭偰乽師偺儁乕僕傊恑傓乿丄乽慜偺儁乕僕偵栠傞乿偲偄偭偨斀懳偺巜帵撪梕傪昞尰偡傞庤怳傝摦嶌偱偡丅
傑偀丄僞僢僠僷僱儖偱巜傪僗僢偲摦偐偟偰夋柺傪僗儔僀僪偝偣傞偺傪丄僇儊儔巊偭偰旕愙怗偵傗偭偰傗傠偆丄偲偄偆偙偲偱偡丅
庤怳傝偵傛傞僷儚乕億僀儞僩偺僗儔僀僪憖嶌椺
仒2.偮偄偱偵巜偺杮悢傕
丂偪傚偭偲偟偨梫惪偱丄巜偺杮悢偱僠儍儞僱儖偑曄偊傜傟傞傛偆偵偭偰偄偆傕偺偑偁傝丄尰忬偙傫側姶偠偵側偭偰傑偡丅(攚宨傗巜偺弌偟曽傪尒偰傢偐傞傛偆偵丄偱偒傞傛偆偵偱偒偰傞姶偠偱偡)



仒3.幚憰偵偁偨偭偰
丂乽巜偺杮悢丄庤怳傝摦嶌偲偐擣幆偱偒傞乣乿丄偲尵偭偰偄傑偡偑丄偙傟傪傗偭偰偄傞攚宨傪尒偰傕傜偆偲傢偐傞偲偍傝扨弮攚宨偱偡丅怓偱庤傪庢傝弌偟偰丄擣幆張棟偵偮側偘偰傑偡丅
偲丄偄偆偙偲偼庤偑庢傝弌偣側偄偲巒傑傜側偄傢偗偱偡(傕偭偲堘偆摿挜峫偊偰偄偐側偄偲側偀丒丒丒)丅
偝偰丄杮尋媶幒偱偼嬤愒奜椞堟偵偍偗傞敡偲偄偆慺嵽偺斀幩摿惈傪巊偭偰敡椞堟偺拪弌傪峴偆嬤愒奜敡専弌朄偺尋媶偑偝傟偰偄傑偡丅偙偺庤朄偼丄栚偵尒偊側偄2庬椶偺嬤愒奜岝(870nm偲970nm)傪徠幩偟偰丄偦偺2攇挿娫偵偍偗傞敡偺斀幩摿惈偺堘偄(敡偼870nm偺岝偺曽偑970nm傛傝斀幩偟傗偡偄=奺乆偺攇挿偺岝傪徠幩偟偨偲偒偵摼傜傟傞2枃偺徠幩夋憸偵偍偄偰丄敡椞堟偺婸搙抣偼870nm偺曽偑970nm偺偲偒傛傝崅偔側傞)偐傜丄2枃偺徠幩夋憸娫偺嵎暘傪偲傞偙偲偱丄偦偺惈幙傪専弌=敡偲偄偆慺嵽傪拪弌偟傑偡丅



870nmImage 970nmImage Result
仒4.PC僀儞僞僼僃乕僗僔僗僥儉
丂偲丄偄偆偙偲偱壓偺傛偆側傕偺嶌偭偰傒傑偟偨丅
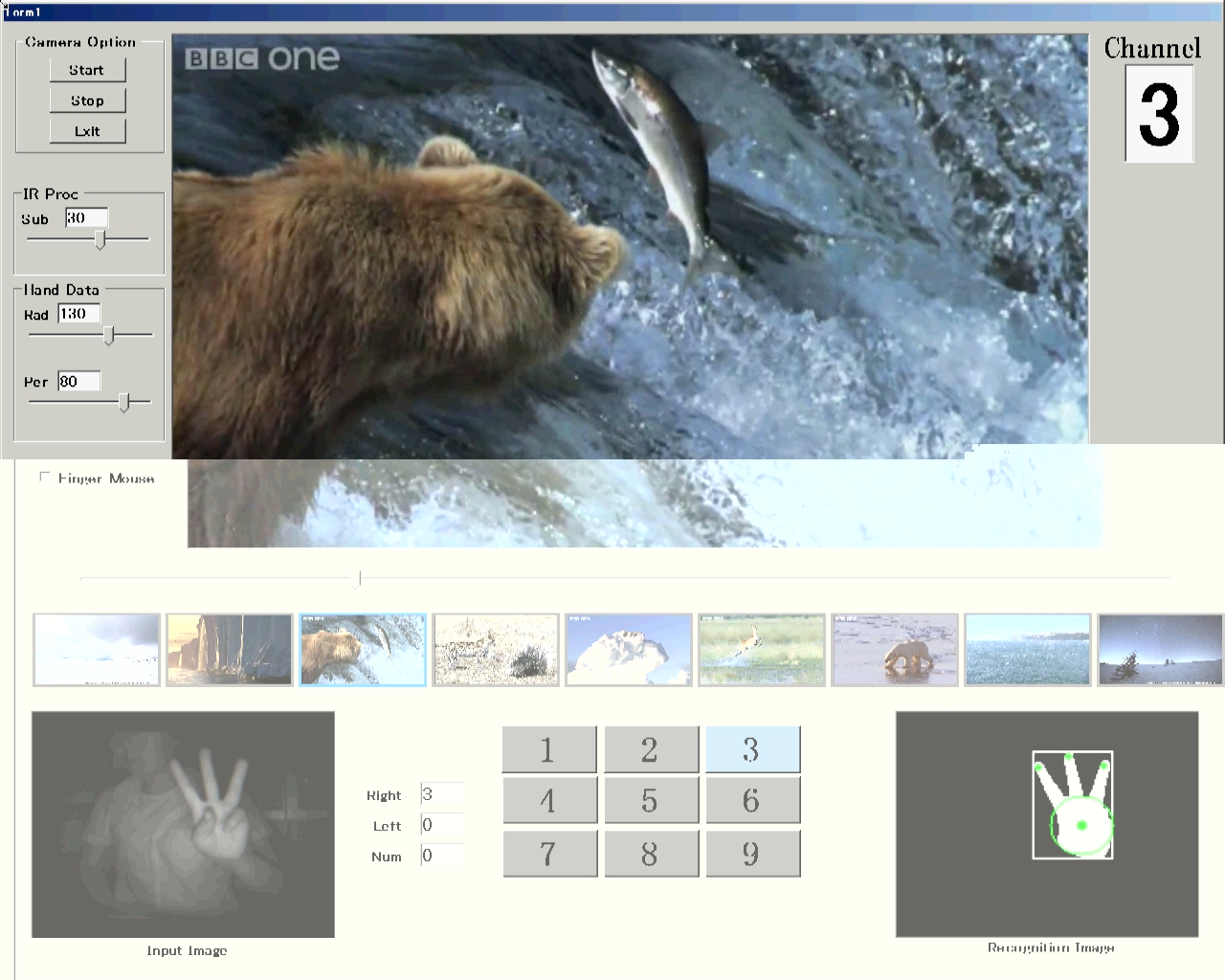
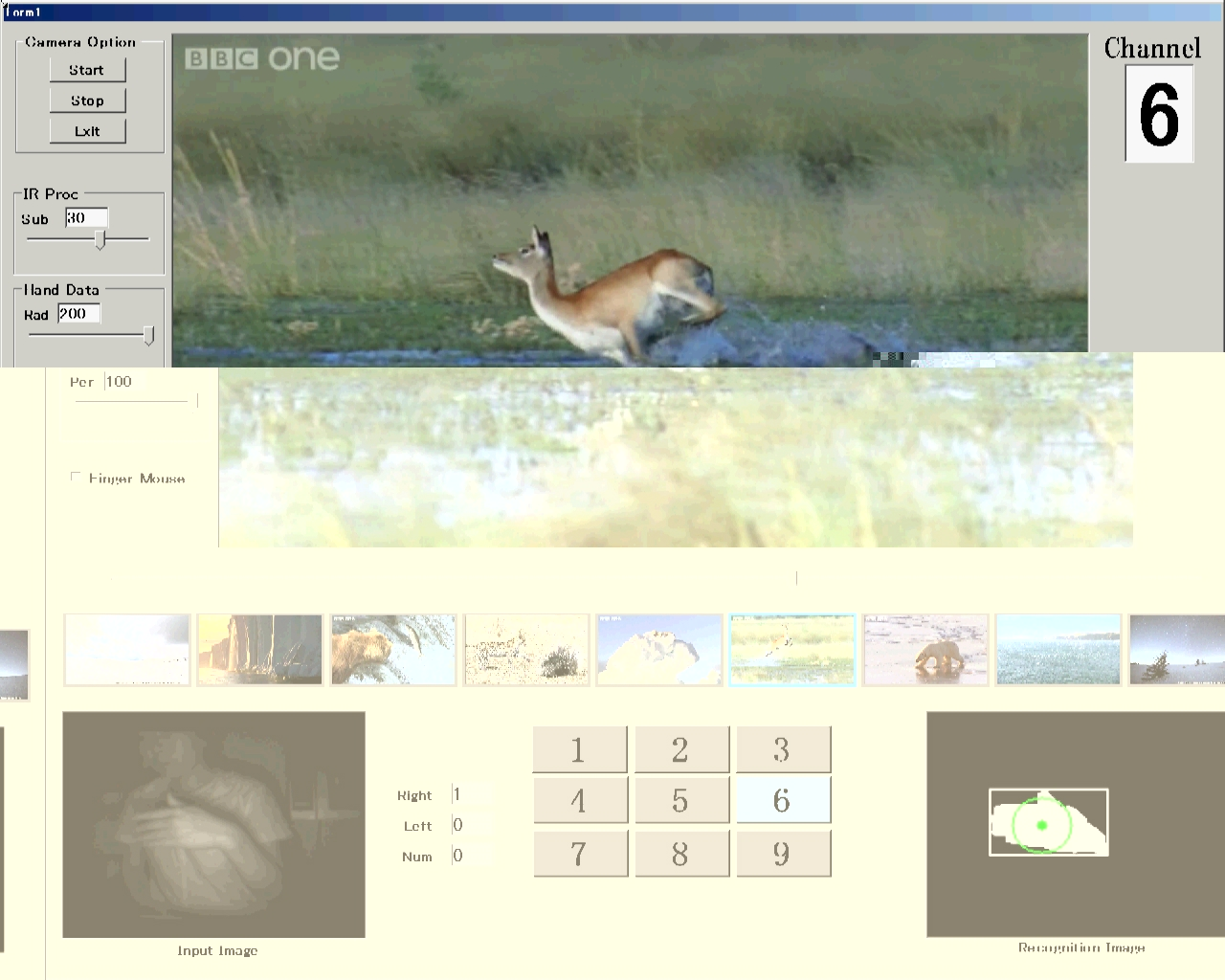
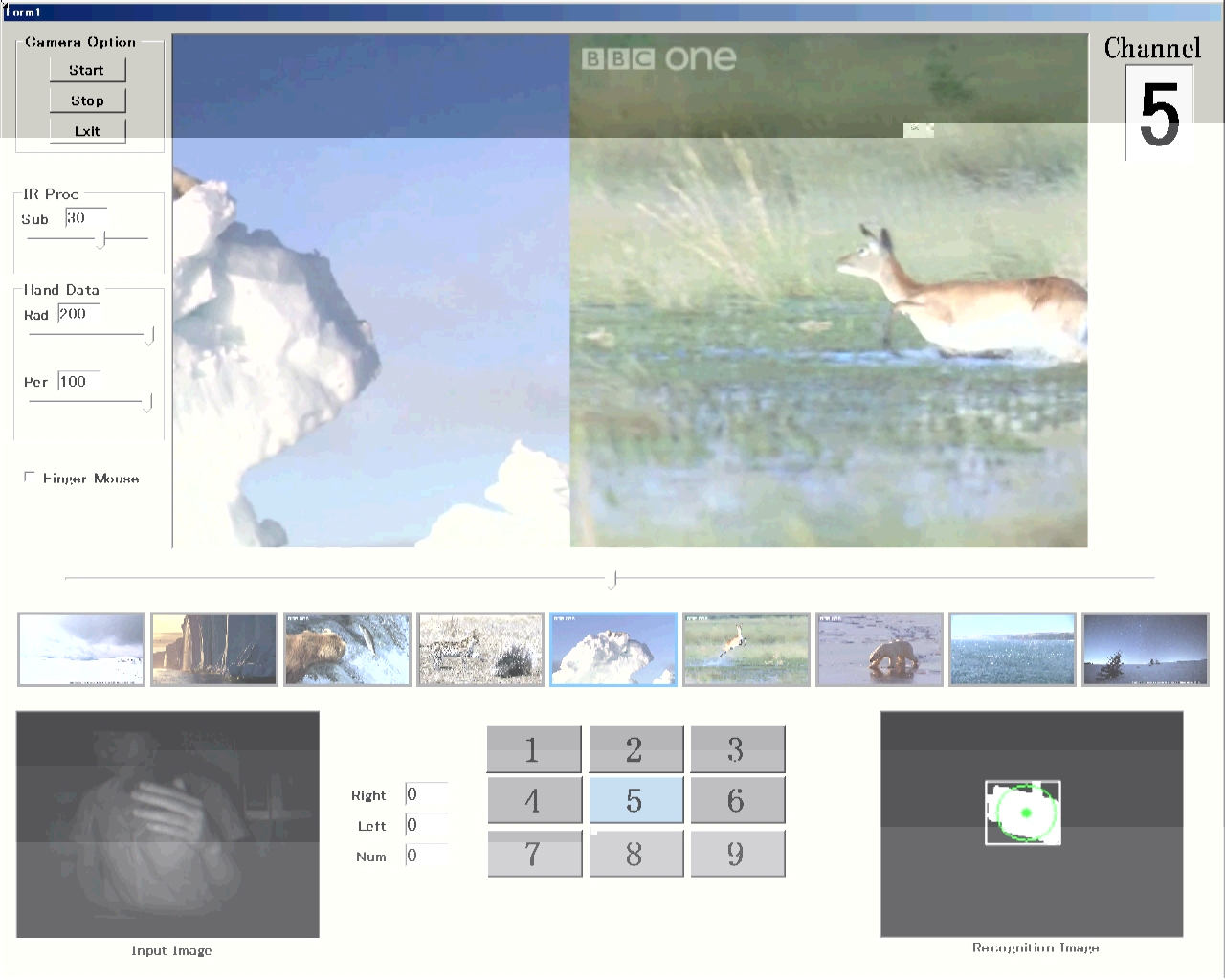
丂丂丂丂巜偺杮悢偱夋柺偑愗傝懼傢傞 丂丂 丂丂丂丂丂丂丂 丂庤怳傝拞丂丂丂丂丂丂丂丂丂丂丂丂 丂丂丂丂庤怳傝偺曽岦惈偱夋柺偑僗儔僀僪
巜偺杮悢偱僠儍儞僱儖愗傝懼偊
庤怳傝摦嶌偱夋柺傪僗儔僀僪