その動作支援システムの研究を進めています。
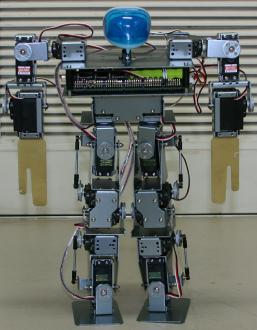
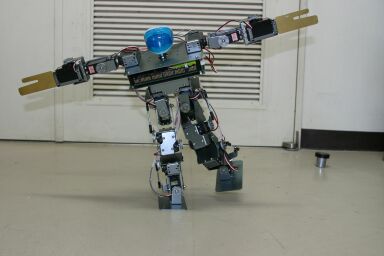
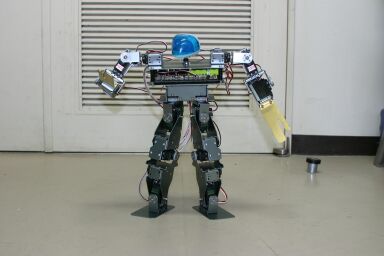
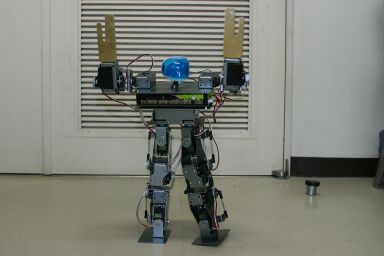
次世代を担う小型二足歩行ロボット。前高は50cmくらいです。
搭載したロボット制御基盤による命令で、
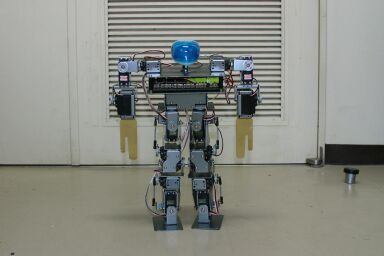
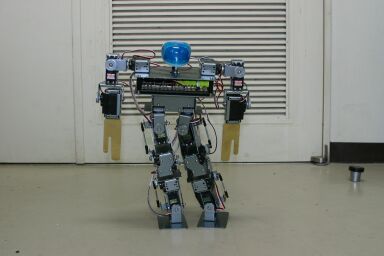
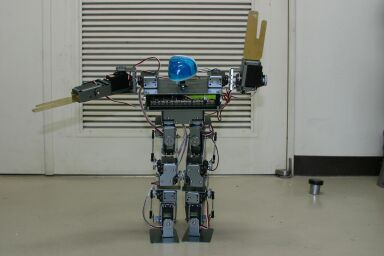
全身のサーボモータを駆動制御することで各種動作を実現。
成果が出るまで、詳細な解説はお待ちを・・・。
ちなみに、こんなこともしてました。
視体積交差法による、シルエット画像からの物体復元。
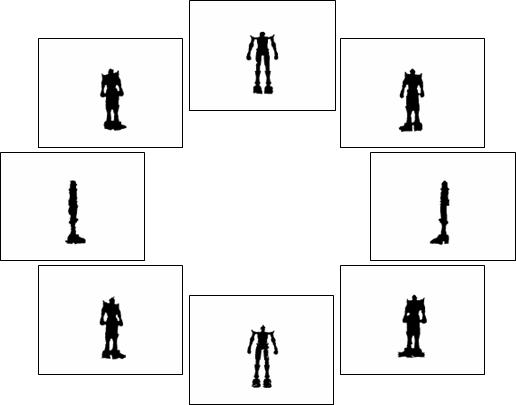
このような8方向から取得されたシルエット画像から、
次のような、もとのオブジェクトを復元します。

とにかく藤枝は、『ロボットと画像処理』という観点に焦点を当てて、
何らかの形でそれらを実現させるシステムの構築に取り組んでいます。
